
NEWSLATEST NEWS ABOUT THE COMPANY
NEWS
LATEST NEWS ABOUT THE COMPANY
World's First! ByteDance's GR-Dexter Breaks Through in VLA Control, Electronic Skin Completes the Perceptual Loop
World's First! ByteDance's GR-Dexter Breaks Through in VLA Control, Electronic Skin Completes the Perceptual Loop
发布日期:2026-01-26 18:01
Recently, the Seed Team of ByteDance launched the GR-Dexter System, achieving a "holy grail-level" breakthrough in the robotics field. As the world's first integrated framework that scales VLA models to high-degree-of-freedom dexterous hands, it has successfully overcome three major challenges: the curse of dimensionality, perceptual blind spots, and data scarcity.
Its core achievements are nothing short of a milestone: the 56-degree-of-freedom dual-arm system (21 degrees of freedom per hand) enables precise control to complete long-sequence tasks such as vacuuming and bread splitting. It operates stably even with unknown objects and abstract instructions, laying a solid foundation for the commercialization of general-purpose household and medical care robots.
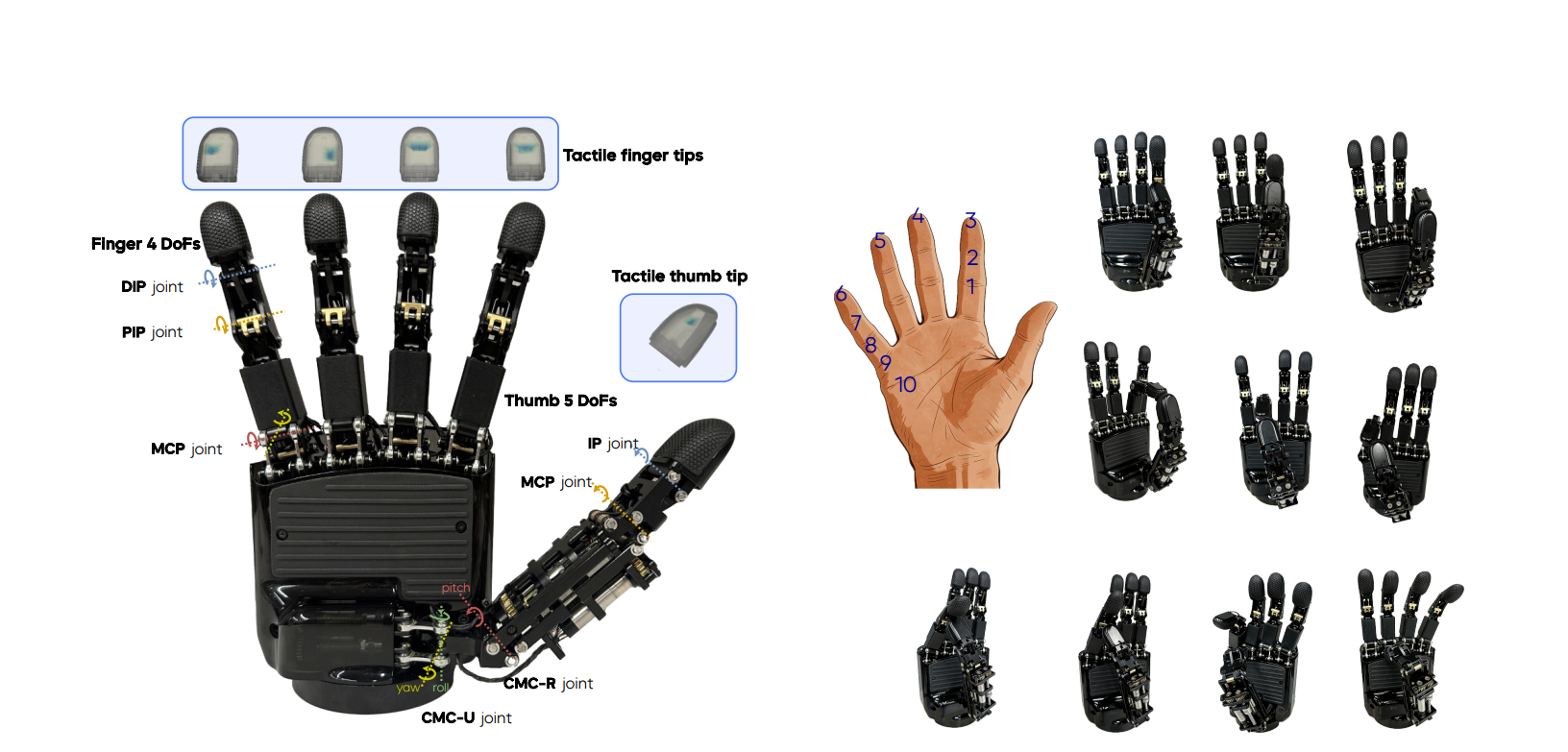
The key to the dexterous hand's precise tactile sensing lies in FiSensor High-Density Tactile Electronic Skin.
FiSensor Electronic Skin: The "Tactile Nerve" of Dexterous Hands
Human-like operations of high-degree-of-freedom dexterous hands are inseparable from accurate tactile feedback.
FiSensor High-Density Tactile Electronic Skin perfectly meets the requirements with four core advantages:
1.Full Curved Surface Coverage: Flexible packaging technology seamlessly fits the curved structure of dexterous hands, enabling dead-angle-free sensing across 16 key palm areas, and solving the problem of perceptual loss caused by finger-object occlusion.
2. Ultra-High Precision: With a sensitivity of 1g that surpasses human fingertips, it captures sub-millimeter-level position changes and tiny force trends, ensuring zero errors in delicate operations such as bread splitting and thin paper pinching.
3.Wide-Range Force Adaptation: It seamlessly switches from the micro-force of egg pinching to the strong force of heavy object lifting, supporting diverse tasks without the need to replace sensors.
4.Low Temperature Drift Stability: Special nanomaterials ensure reliable data even under temperature fluctuations, guaranteeing continuous and accurate operation in open scenarios.
Full-Stack Synergy: Tactile Technology Connects Hardware, Models, and Data
The practice of ByteDance's GR-Dexter once again confirms that:
The upper limit of robot intelligence depends on the depth of its ability to perceive the physical world. Electronic skin is no longer an optional feature, but a standard "nerve" for general-purpose robots.
- Hardware Layer: It serves as the "tactile brain" for the ByteDexter V2 dexterous hand, providing real-time feedback on grasping force and contact status, and upgrading flexible joints into intelligent manipulators.
- Model Layer: Tactile data forms multi-modal complementarity with vision and language, helping VLA models solve high-dimensional control problems, adjust motion commands in real time, and improve control accuracy.
- Data Layer: It outputs refined time-series tactile data, which becomes the core of the "data pyramid", alleviating the pain point of data scarcity in high-degree-of-freedom operations and enhancing the generalization ability of models.

The latest breakthrough of ByteDance's GR-Dexter marks that robots are moving from executable operations to human-like operations, taking a crucial step forward.
Behind this transformation, tactile sensing has become an indispensable core capability. As a leader in the field of flexible multi-modal sensors, FiSensor continues to deepen its research in tactile sensing technology, providing key perceptual solutions for diverse scenarios such as high-degree-of-freedom dexterous hands and industrial robots. By endowing robots with more realistic and precise tactile feedback, FiSensor is accelerating the advent of the general-purpose robot era, enabling intelligent machines to truly perceive and understand the world.
-END-
share with:
Recommended Featured Articles