EXPLORE MORE DETAILSEXPLORE MORE DETAILS
EXPLORE MORE DETAILS
EXPLORE MORE DETAILS
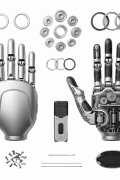
Flex Hand_F25
Flex Hand_F25
分类:Dexterous Hand_Case Sensors/E_Skin
Flex Hand_F25
Flex Hand_F25
Transmission: Full Tendon Drive
Interface: CAN / EtherCAT; SDK, ROS1 / ROS2
Speed / Accuracy: <0.6 s open/close; ≤0.2 mm repeatability
Tactile: 0.1 N sensitivity
More: