EXPLORE MORE DETAILSEXPLORE MORE DETAILS
EXPLORE MORE DETAILS
EXPLORE MORE DETAILS
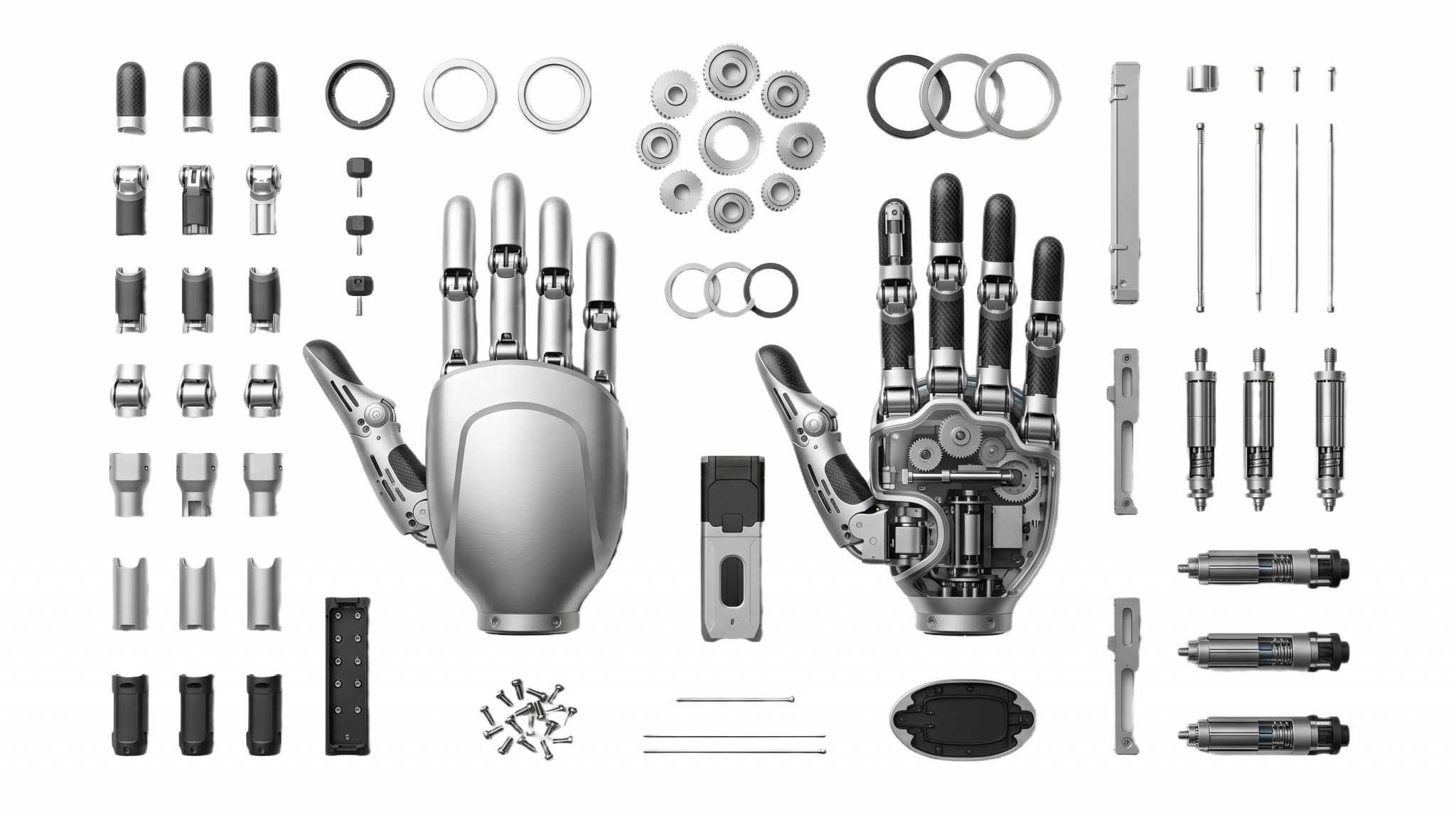
Direct-Drive_DD16
Direct-Drive_DD16
分类:Dexterous Hand_Case Sensors/E_Skin
Direct-Drive_DD16
Direct-Drive_DD16
Transmission: Direct
Interface: CAN-FD; 1000 Hz
Speed / Accuracy: 0.8 s open/close; ±0.2 mm homing
Tactile: 6×12 piezoresistive array; 200 FPS
More:





