Enabling Humanoid Robots With Human-Level Dexterous Manipulation
Enabling Humanoid Robots With Human-Level Dexterous Manipulation
Multimodal Dexterous Manipulation Database
Bridging Human Demonstration And Robot Execution To Build A Trainable, Transferable, And Continuously Evolving Data Foundation For Embodied Intelligence
Bridging Human Demonstration And Robot Execution To Build A Trainable, Transferable, And Continuously Evolving Data Foundation For Embodied Intelligence
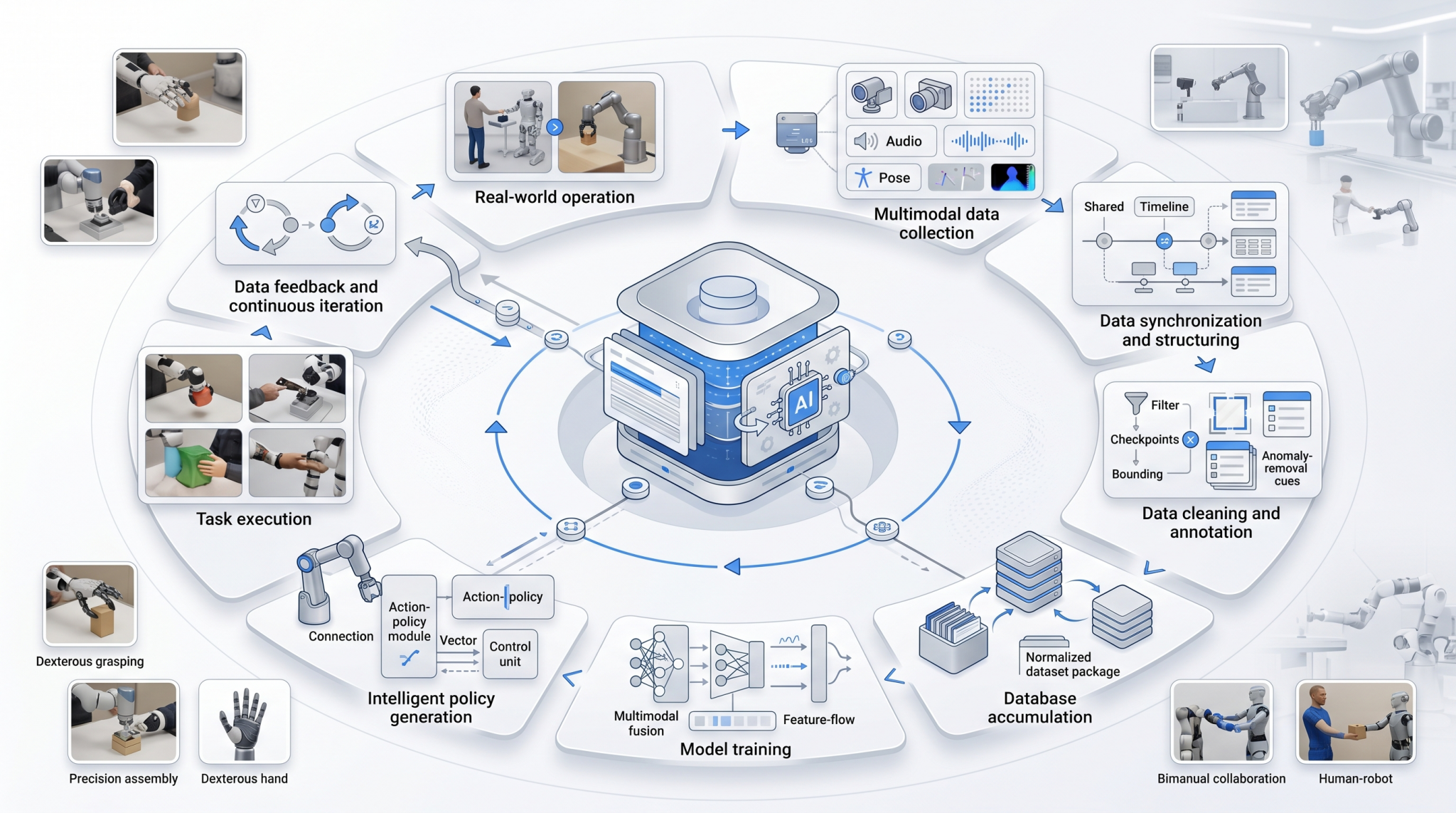
Dual-Source Data Architecture
Human Demo Data | Embodiment-agnostic; accumulates fine manipulation priors at scale |
Robot Execution Data | Teleoperated platforms; captures full perception → decision → execution pipeline |
Dual-Source Synergy | Supports pre-training, fine-tuning, evaluation, and cross-embodiment transfer |
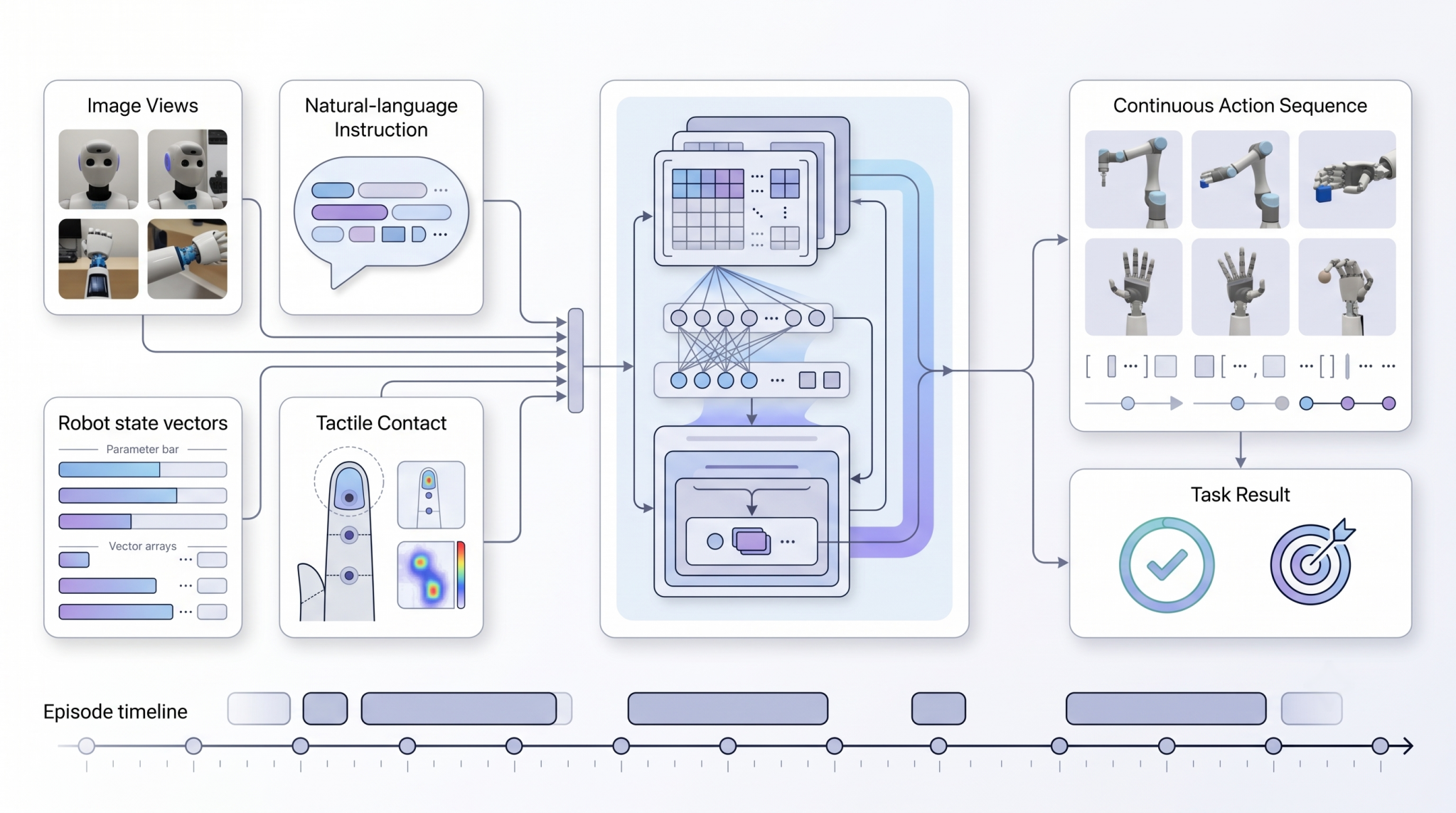
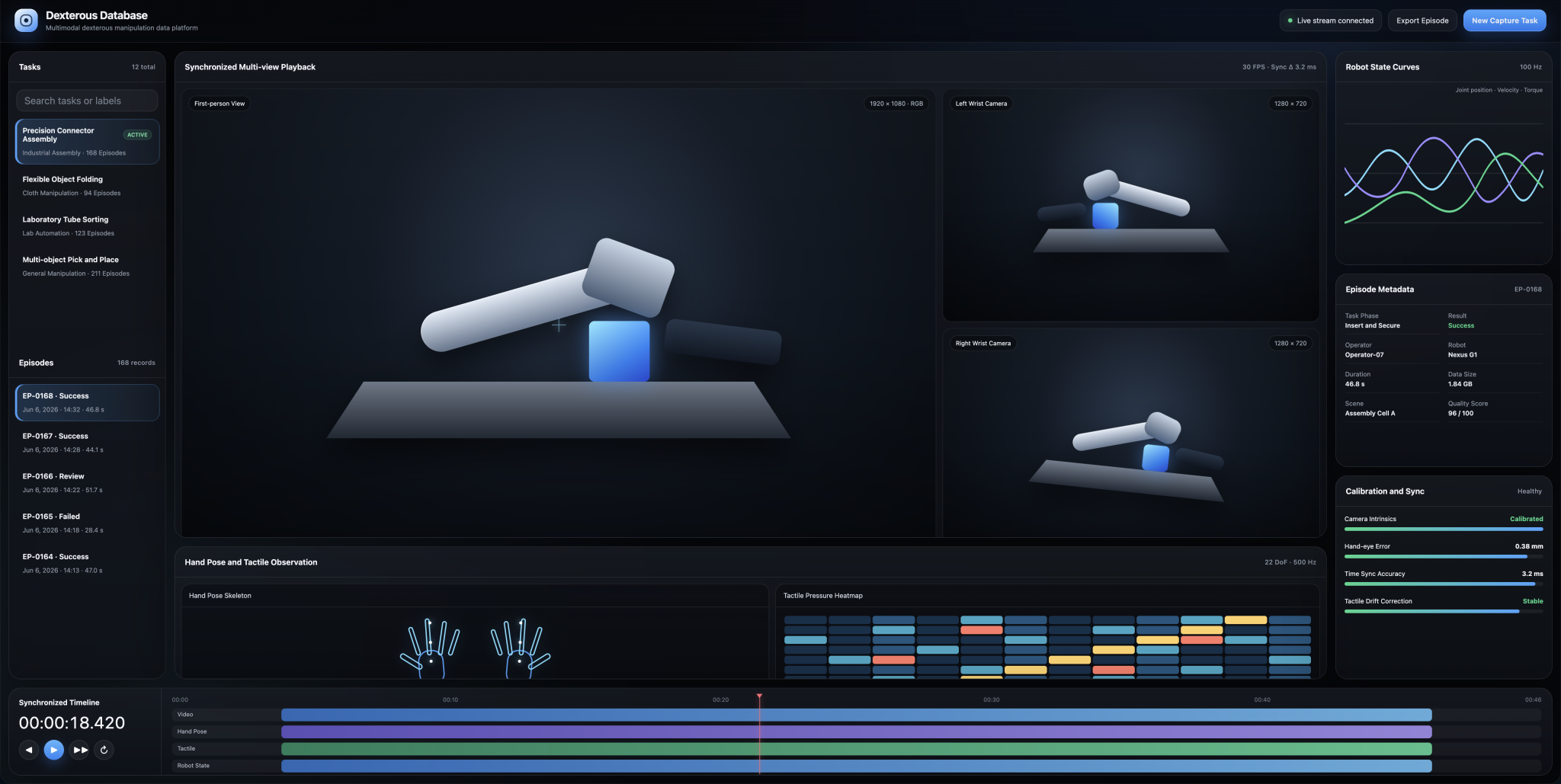
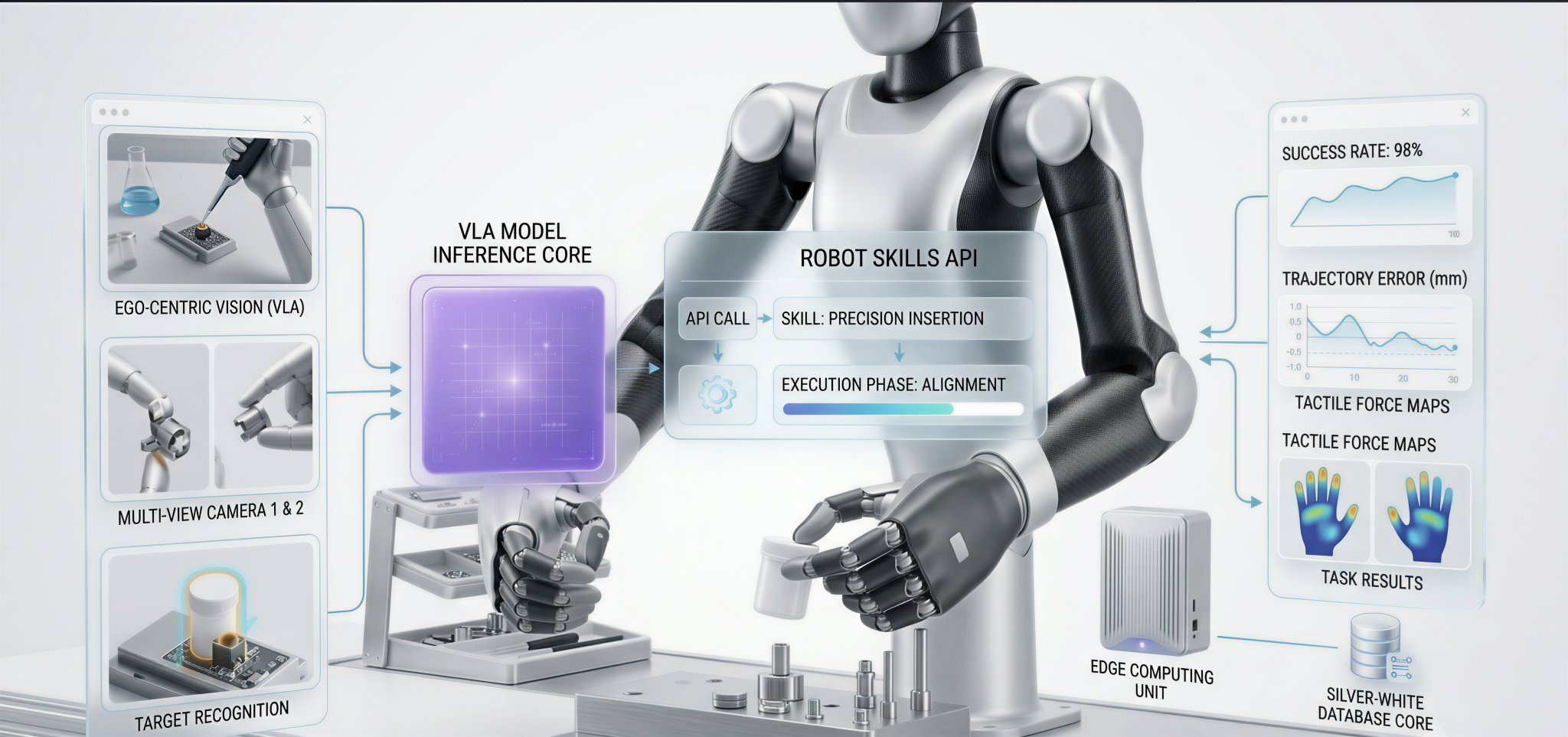
Multimodal Operational Representation
▸ Multi-view vision |
▸ Hand kinematics & robot joint state |
▸ Tactile & force sensing |
▸ Task semantics & temporal annotation |
Standardized Episode Data Unit
Type A | Human Demonstration Episode — cross-platform transferable manipulation priors |
Type B | Robot Embodiment Episode — execution data aligned to specific action spaces |

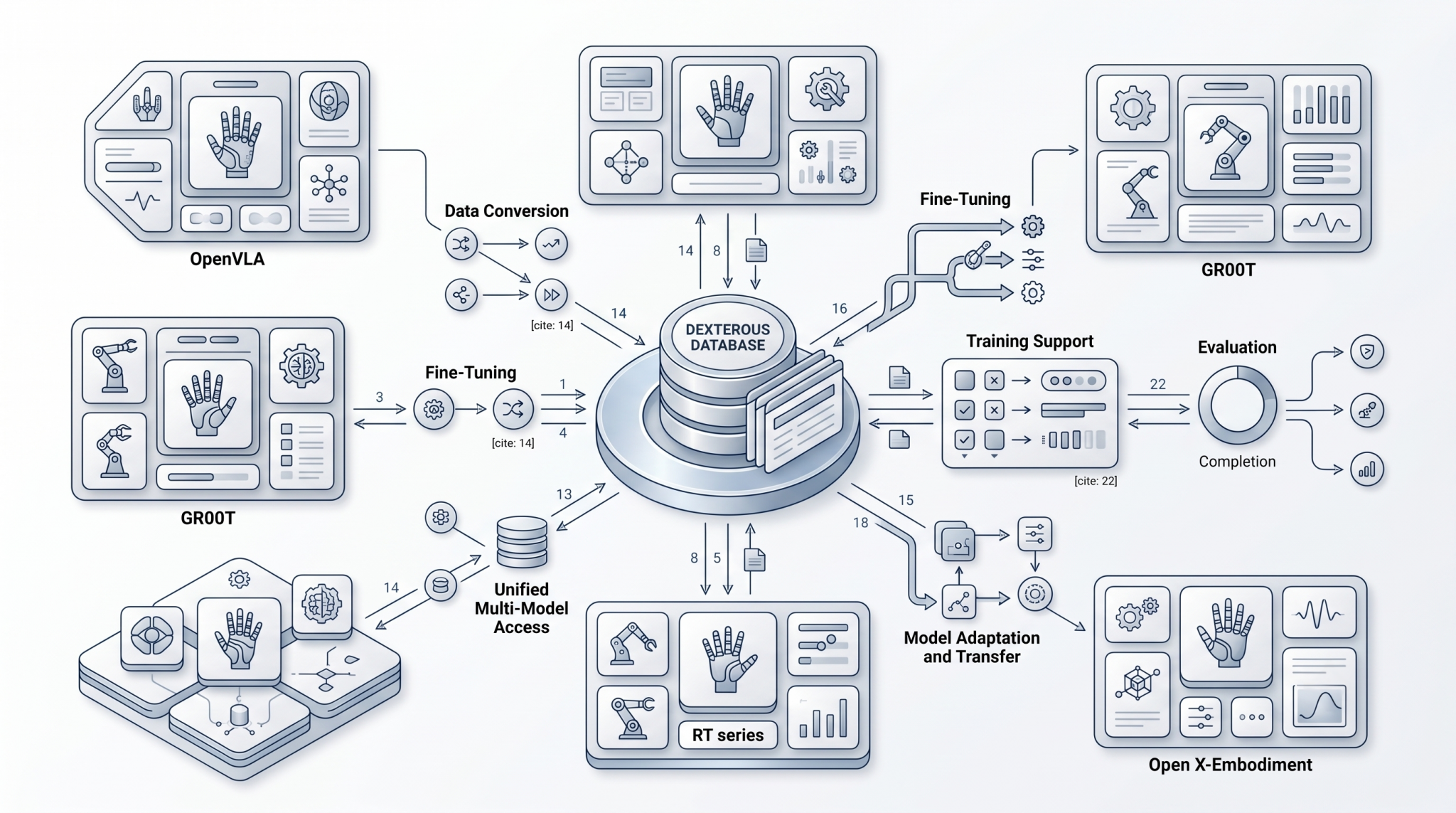
Model & Learning Paradigm Support
▸ Robot Foundation Models |
▸ Vision-Language-Action Models (VLA) |
▸ Imitation Learning / Behavior Cloning |
▸ Robot Policy & Skill Models |
▸ Reinforcement Learning / Offline RL |
▸ World Models & Action Prediction |
▸ Multimodal Perception & Fusion |
▸ Cross-Embodiment & Action Mapping |
Real-World Task Coverage
▸ Object Pick & Place |
▸ In-Hand Dexterous Manipulation |
▸ Precision Assembly |
▸ Tool Use |
▸ Deformable Object Manipulation |
▸ Bimanual / Dual-Arm Coordination |
▸ Human-Robot Collaboration & Handover |
Data Products & Services
Standardized Datasets | Cleaned, annotated, and structured for model training and evaluation |
Custom Collection | Targeted data collection for specified tasks, scenes, and robot platforms |
Training Data Engineering | Action conversion, Episode curation, and training format adaptation |
Data Governance | Quality assessment, version control, and private data management |