NEWSLATEST NEWS ABOUT THE COMPANY
NEWS
LATEST NEWS ABOUT THE COMPANY
FiSensor Achieves Breakthrough in Piezoresistive 3D Force Tactile Sensing, Significantly Enhancing 3D Interaction Data Acquisition Capability
FiSensor Achieves Breakthrough in Piezoresistive 3D Force Tactile Sensing, Significantly Enhancing 3D Interaction Data Acquisition Capability
发布日期:2026-01-26 18:05
As embodied intelligence evolves, it becomes increasingly reliant on high-quality interaction data, especially physical information such as contact, force application, and stability.
However, in practical applications, the stable and large-scale acquisition of such data has long been challenging, which has become a key constraint on robots’ fine manipulation capabilities and real-world data collection.
During actual operations, robots need not only to perceive the environment but also to judge how to apply force, whether the state is stable, and whether slippage occurs during motion execution. Such critical information is mainly dependent on tactile sensing.
Piezoresistive tactile sensors have been widely used in robotic electronic skin and data acquisition hardware due to their high reliability, low cost, and easy integration.
This time, drawing on first principles and inspired by the composite 3D sensory structure of human skin composed of the epidermis, dermis, and subcutaneous tissue, the Chinese-U.S. joint team of FiSensor has designed and realized a technical route for 3D-structured electronic skin that mimics human tactile mechanisms.
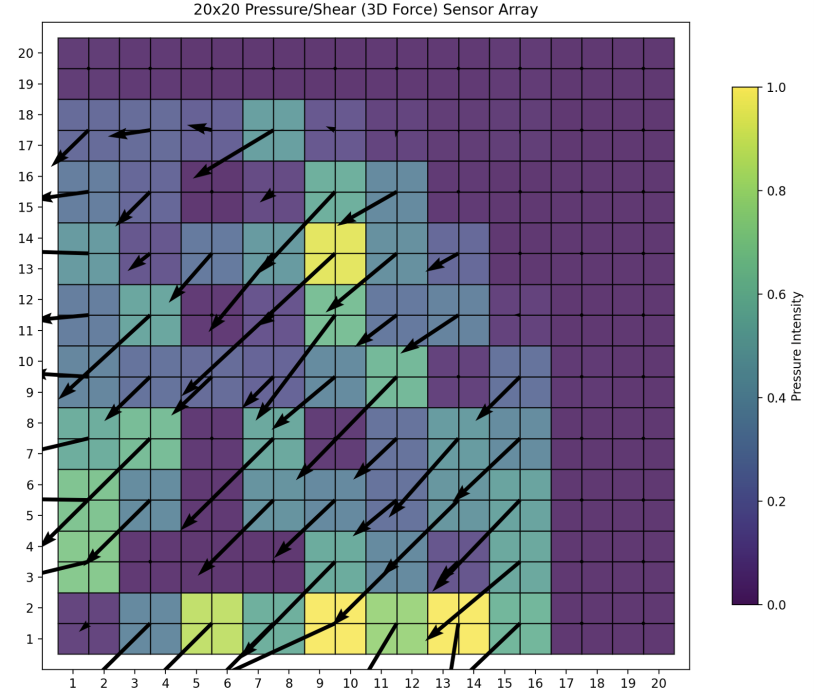
Based on this 3D architecture, FiSensor has constructed a high-density 3D sensory structure within a fingertip-sized space. This enables piezoresistive sensors to generate high-resolution physical responses to both normal forces and tangential forces simultaneously, achieving real physical acquisition of tangential forces, forming the piezoresistive 3D force tactile sensing capability, and completing a key breakthrough in this technical route.
This progress significantly enhances the collectability of 3D interaction data, expanding tactile data from a single pressure signal to 3D data that can describe force direction, contact stability, and interactive dynamic states. It provides more comprehensive physical constraints for operational processes and a more reliable data foundation for improving robots’ fine manipulation and interaction capabilities.
Currently, this 3D force tactile capability has begun to be applied in flexible electronic skin and tactile fabric gloves:
- In electronic skin, it is used to enhance the perception integrity of robotic end-effectors regarding contact states and grasping processes.
- In tactile gloves, it is used to collect 3D interaction data during human real-world operations, providing fundamental support for the construction of high-quality operational datasets.
Without introducing complex structures or high-cost solutions, the piezoresistive 3D force tactile route designed based on the 3D architecture provides a low-cost and engineering-feasible implementation method for electronic skin and 3D interaction data collection.
-END-
share with:
Recommended Featured Articles